- Címlap
- LED kijelzők meghajtása
- Permetező projekt
- PIC18FxxK42
- PIC18FxxK42 I2C regiszterei
- PIC18FxxK42 órajel beállítása
- Pic18FxxK42 regiszterei
- Láb hozzárendelés PIC18FxxK42
- Pic18 I2C programozás
- PIC18FxxK42 I2C kommunikáció
- EEPROM memória használata
- LIN UART-tal fordítás
- LM75A és PIC18F45K42 I2C1 program
- Objektumok
- Pic18FxxK42 konfigurálás
- SPI
- UART PIC18(L)F45K42
- Watchdog Timer
- PIC18F45K42 timer2,-4,-6
- I2C modul 1
- PIC18F45K22 I2C lépései
- PIC18F45K42 USART regiszterei és azok magyarázata II.
- PIC18F45K42 USART regiszterei
- PIC18F45K42 timer1,-3,-5
- UART PIC18F45K42
- PIC18 utasításkészlete
- USART mudullal aszinkron kapcsolat két mikrokontroller közt
- CAN kommunikáció
- DS3231SN RTC
- Dell T 5600
- E-paper
- EGYÉB jegyzet
- ESP 8266 WiFi modul
- ESP-07 ESP-12x
- ESP-12F WiFi modul
- ESP32
- ESP8266
- Egyéb (elektronika)
- Emeléskijelző projekt
- Giroszkóp
- HASZNOSAK
- Hasznos általános linkek
- Illesztő modulok
- Kapcsolások, megoldások
- Kiszajú műveleti erősítő
- Konfigurálás
- LIN kommunikáció UART-tal
- MPASM PIC18
- Nyomásmérés MS5803-05BA-val
- Nyomásmérő I2C
- Nyomásszenzor SPD8xx I2C
- Nyák, nyáktervezés
- Operációs rendszerek
- PIC 18 mikrokontrollerek
- PIC18(L)F47K40
- PIC18(L)F65K40
- PIC18F45(K)50
- PIC18F87k22(80 láb)
- PROGRAMOZÁS
- Programozás
- Python 3
- RAUCH 2057153
- RDS
- RTC TLC 5947-el
- Rádiókapcsolat két mikrokontroller között
- Számítógépes programok
- TCS34725 színérzékelő
- TLC 5947
- TTP223 kapacitív nyomógomb
- USB + USB AN1310-el
- Ulefone Power 2
- Vektoros megszakítások
- Vetőgép
- Webfejlesztés
- WiFi, Bluetooth modulok
- Pickit 3 programozó
- Pic-Ethernet-Pic
- LM75A
- PWM CCPx modullal
- PWM PWMx modullal
- NCO
- TCS 3200 RGB érzékelés
- Nyáktervezés
- Oktatás
- PIC 24 mikrokontrollerek
Érdeklődési kör: elektronika, programozás, mikrokontroller programozás
Giroszkóp
Bosh RET-től: https://www.ret.hu/media/product/28693/485352/BST-BMI160-DS000-07.pdf
 |
 |
Általános dokumentáció: MPU 6000 (6050) Datasheet.pdf
Regiszterek dokumentásiója: MPU 6000 (6050) Register Map.pdf
Konfigurálás: https://de.coredump.biz/questions/51879700/how-to-calculate-forward-speed-using-mpu6050
https://www.aliexpress.com/af/MPU-6000-.html?d=y&origin=n&SearchText=MPU+6000+&catId=0&initiative_id=SB_20191209123424
Panel: https://www.aliexpress.com/item/32402312087.html?spm=a2g0o.productlist.0.0.20f71ea305r7Yq&algo_pvid=79263aeb-450c-457c-8565-cc47e0aff5c4&algo_expid=79263aeb-450c-457c-8565-cc47e0aff5c4-2&btsid=6cef8a16-ebde-4444-b08f-3e3276b36d86&ws_ab_test=searchweb0_0,searchweb201602_10,searchweb201603_55
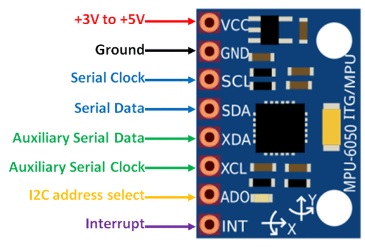
MPU-6000/MPU-6050 és a mikrokontrollel kapcsolódása SPI interfészen
| Bekötés SPI üzemmódban: mit mivel kell összekötni | |||
| Mikrokontroller | Modul (panel) | MPU 6050 IC | |
| 1. | Értelemszerűen a tápfeszültség pozitív feszültsége, ami 3,3V és összeköthető az MPU pozitív tápfeszültség bemenetével. Megj.: a MPU panelos változatánál a panelon van egy 3,3 V-ra leszabályozó feszültségstabilizátor IC. | VCC - | VDD (13) - |
| 2. | Értelemszerűen a tápfeszültség negatív (föld=0V) feszültsége, ami összekötendő az MPU negatív (föld=0V) tápfeszültség bemenetével. | GND - | GND (18) - |
| 3. | SCK(out) - Mikrokontroller által szolgáltatott szinkronjel az MPU számára. | SCL - | SCLK (23) - |
| 4. | SDO - Mikrokontroller soros (SPI)adatkimenete. A panelnál nyitott kollektorral kell vezérelni, mert a panelon van felhúzó ellenállás. Ezt ellenőrizni kellene! |
SDA - | SDI (24) - |
| 5. | XDA - Opcionálisan | AUX_DA (6) - | |
| 6. | XSL - Opcionálisan | AUX_CL (7) - | |
| 7. | SDI - Mikrokontroller soros (SPI)adatbemenete. A panelnál nyitott kollektorral kell vezérelni, mert a panelon van felhúzó ellenállás. Ezt ellenőrizni kellene! |
AD0 - | SDO (9) - |
| 8. | Be kell kötni és vezérlést kell kiadni | (!CS) (8)
[VLOGIC] (8) - |
|
| 9. | Az MPU 6050 IC jelzi az MCU-nak, hogy készen vannak az adatok, | INT - | INT (12) - |
| 10. | SFYNC (11) - | ||
| 11. | CPOUT (20) - | ||
| 12. | REGOUT (10) - | ||
| 13. | CLKIN (1) - | ||
| 14 | CLKOUT (22) - | ||
| 15 | (10) - 100 nF kondenzátort kell a 10-es láb és a GND (föld) közé. | ||
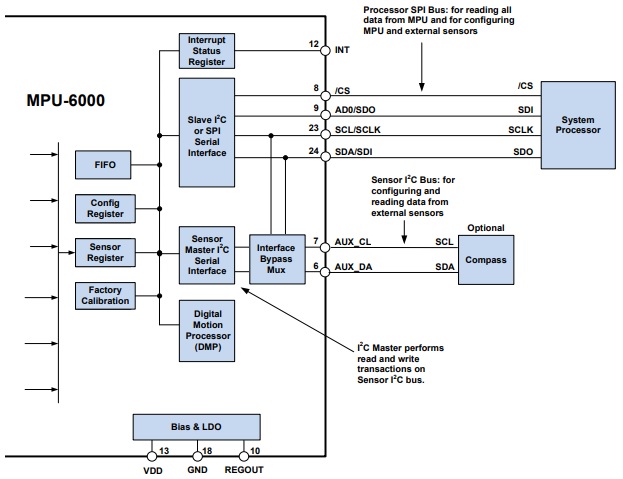
| 7.14 MPU-6000 az SPI interfész használatával Az alábbi ábrán a rendszerprocesszor az MPU-6000 SPI mestere. A 8., 9., 23. és 24. érintkezők támogatják az !CS, SDO, SCLK és SDI jeleket az SPI kommunikációhoz. Mivel ezeket az SPI-érintkezőket megosztják az I2C slave tűkkel (9, 23 és 24), a rendszerprocesszor nem fér hozzá az I2C kiegészítő buszhoz az interfész bypass multiplexer útján, amely az I2C processzor interfész csapjait az érzékelő I2C interfész csapjaihoz köti. Mivel az MPU-6000 korlátozott képességekkel rendelkezik, mint I2C mester, és attól függ, hogy a rendszerprocesszor kezeli-e a kiegészítő érzékelők kezdeti konfigurációját, egy másik módszert kell alkalmazni az érzékelők programozására az I2C kiegészítő érzékelő 6. és 7. érintkezőjén (AUX_DA) és AUX_CL). Az SPU kommunikáció használatakor az MPU-6000 és a rendszerprocesszor között az eszközök konfigurálása a kiegészítő I2C érzékelő buszon úgy érhető el, hogy az I2C 0-4 szolga segítségével bármilyen eszközön olvasási és írási tranzakciókat hajthat végre, és regisztrálhatja a kiegészítő I2C buszon. Az I2C Slave 4 interfész csak egybájtos olvasási és írási tranzakciók végrehajtására használható. A külső érzékelők konfigurálása után az MPU-6000 egy vagy több bájtos leolvasást végezhet az I2C érzékelő busz segítségével. A Slave 0-3 vezérlők által olvasott eredményeket be lehet írni a FIFO pufferbe, valamint a külső érzékelő regiszterekbe. Az MPU-60X0 kiegészítő I2C interfészének vezérléséről az MPU-6000 / MPU-6050 regisztereinek ismertetője és a regiszereinek leírása című dokumentumban olvashatunk. |
7.14 MPU-6000 Using SPI Interface In the figure below, the system processor is an SPI master to the MPU-6000. Pins 8, 9, 23, and 24 are used to support the /CS, SDO, SCLK, and SDI signals for SPI communications. Because these SPI pins are shared with the I2C slave pins (9, 23 and 24), the system processor cannot access the auxiliary I2C bus through the interface bypass multiplexer, which connects the processor I2C interface pins to the sensor I2C interface pins. Since the MPU-6000 has limited capabilities as an I2C Master, and depends on the system processor to manage the initial configuration of any auxiliary sensors, another method must be used for programming the sensors on the auxiliary sensor I2C bus pins 6 and 7 (AUX_DA and AUX_CL). When using SPI communications between the MPU-6000 and the system processor, configuration of devices on the auxiliary I2C sensor bus can be achieved by using I2C Slaves 0-4 to perform read and write transactions on any device and register on the auxiliary I2C bus. The I2C Slave 4 interface can be used to perform only single byte read and write transactions. Once the external sensors have been configured, the MPU-6000 can perform single or multi-byte reads using the sensor I2C bus. The read results from the Slave 0-3 controllers can be written to the FIFO buffer as well as to the external sensor registers. For further information regarding the control of the MPU-60X0’s auxiliary I2C interface, please refer to the MPU-6000/MPU-6050 Register Map and Register Descriptions document. |
| 7.15 Belső óragenerálás Az MPU-60X0 rugalmas órajelrendszerrel rendelkezik, amely lehetővé teszi különféle belső vagy külső óraforrások felhasználását a belső szinkron áramkörökhöz. Ez a szinkron áramkör tartalmazza a jelkondicionálót és az ADC-ket, a DMP-t, valamint a különféle vezérlőáramköreket és regisztereket. A beépített PLL rugalmasságot biztosít az óra generálásához szükséges bemenetekben. A belső óra előállításához megengedett belső források a következők:
Az óra pontossága fontos, mivel az időzítési hibák közvetlenül befolyásolják a digitális mozgás-processzor (és kiterjesztéssel bármely processzor) által elvégzett távolság és szög számításokat. Vannak olyan indítási feltételek is, amelyeket figyelembe kell venni. Amikor az MPU-60X0 először elindul, a készülék addig használja a belső óráját, amíg be nem programozzák, hogy egy másik forrásból működjön. Ez lehetővé teszi például a felhasználónak, hogy megvárja, amíg a MEMS oszcillátorok stabilizálódnak, mielőtt az óraforrásként megválasztják őket. |
7.15 Internal Clock Generation The MPU-60X0 has a flexible clocking scheme, allowing a variety of internal or external clock sources to be used for the internal synchronous circuitry. This synchronous circuitry includes the signal conditioning and ADCs, the DMP, and various control circuits and registers. An on-chip PLL provides flexibility in the allowable inputs for generating this clock. Allowable internal sources for generating the internal clock are:
Clock accuracy is important, since timing errors directly affect the distance and angle calculations performed by the Digital Motion Processor (and by extension, by any processor). There are also start-up conditions to consider. When the MPU-60X0 first starts up, the device uses its internal clock until programmed to operate from another source. This allows the user, for example, to wait for the MEMS oscillators to stabilize before they are selected as the clock source. |
| 7.16 Érzékelő-adatnyilvántartások Az érzékelő-nyilvántartások tartalmazzák a legfrissebb giroszkóp, gyorsulásmérő, segédérzékelő és hőmérsékleti mérési adatokat. Ezek csak olvasható nyilvántartások, és a soros interfészen keresztül érhetők el. Az ezekből a nyilvántartásokból származó adatok bármikor olvashatók. A megszakító funkció azonban felhasználható annak meghatározására, hogy új adatok állnak-e rendelkezésre. A megszakított források táblázata a 8. szakaszban található. | 7.16 Sensor Data Registers The sensor data registers contain the latest gyro, accelerometer, auxiliary sensor, and temperature measurement data. They are read-only registers, and are accessed via the serial interface. Data from these registers may be read anytime. However, the interrupt function may be used to determine when new data is available. For a table of interrupt sources please refer to Section 8. |
| 7.17 FIFO Az MPU-60X0 tartalmaz 1024 bájtos FIFO nyilvántartást, amely a soros interfészen keresztül érhető el. A FIFO konfigurációs regiszter határozza meg, hogy mely adatokat írják be a FIFO-ba. A választható lehetőségek között szerepel a giroszkóp, a gyorsulásmérő, a hőmérséklet, a kiegészítő érzékelő és az FSYNC bemenet. A FIFO számláló nyomon követi, hogy hány bájt érvényes adat van a FIFO-ban. A FIFO regiszter támogatja a soros olvasásokat. A megszakítás funkció felhasználható annak meghatározására, mikor állnak rendelkezésre új adatok. A FIFO-val kapcsolatos további információk az MPU-6000 / MPU-6050 regisztrációs térkép és a regisztrációs leírások dokumentumban találhatók. |
7.17 FIFO The MPU-60X0 contains a 1024-byte FIFO register that is accessible via the Serial Interface. The FIFO configuration register determines which data is written into the FIFO. Possible choices include gyro data, accelerometer data, temperature readings, auxiliary sensor readings, and FSYNC input. A FIFO counter keeps track of how many bytes of valid data are contained in the FIFO. The FIFO register supports burst reads. The interrupt function may be used to determine when new data is available. For further information regarding the FIFO, please refer to the MPU-6000/MPU-6050 Register Map and Register Descriptions document. |
| 7.18 Megszakítás A Megszakítás funkciót a Megszakítás konfigurációs regiszter segítségével konfigurálhatjuk. A konfigurálható elemek közé tartozik az INT pin konfiguráció, a megszakítás reteszelési és törlési módszere, valamint a megszakítás indítói. A megszakítást kiváltó elemek a következők: (1) az óragenerátor az új referencia oszcillátorhoz van rögzítve (az óraforrások váltásakor használható); (2) új adatok olvashatók (a FIFO-ból és az adatregiszterekből); (3) gyorsulásmérő esemény megszakad; és (4) az MPU-60X0 nem kapott nyugtát a kiegészítő érzékelőtől a másodlagos I2C buszon. A megszakítás állapota az Interrupt Status regiszterből olvasható ki. A megszakításokkal kapcsolatos további információk az MPU-60X0 regisztrációs térkép és a regisztráció leírása dokumentumban találhatók. Az MPU-60X0 gyorsulásmérő eseményének megszakításaival kapcsolatban lásd a 8. részt. |
7.18 Interrupts Interrupt functionality is configured via the Interrupt Configuration register. Items that are configurable include the INT pin configuration, the interrupt latching and clearing method, and triggers for the interrupt. Items that can trigger an interrupt are (1) Clock generator locked to new reference oscillator (used when switching clock sources); (2) new data is available to be read (from the FIFO and Data registers); (3) accelerometer event interrupts; and (4) the MPU-60X0 did not receive an acknowledge from an auxiliary sensor on the secondary I2C bus. The interrupt status can be read from the Interrupt Status register. For further information regarding interrupts, please refer to the MPU-60X0 Register Map and Register Descriptions document. For information regarding the MPU-60X0’s accelerometer event interrupts, please refer to Section 8. |
| 7.19 Digitális kimeneti hőmérséklet-érzékelő Az MPU-60X0 szerszámhőmérséklet mérésére beépített hőmérsékleti érzékelőt és ADC-t használnak. Az ADC adatai a FIFO-ból vagy a Sensor Data regiszterekből olvashatók. |
7.19 Digital-Output Temperature Sensor An on-chip temperature sensor and ADC are used to measure the MPU-60X0 die temperature. The readings from the ADC can be read from the FIFO or the Sensor Data registers. |
| 7.20 torzítás és LDO Az elfogultság és az LDO szakasz generálja az MPU-60X0 által előírt belső tápfeszültséget és referencia feszültségeket és áramokat. Két bemenete: szabályozatlan VDD 2,355-3,46 V és VLOGIC logikai referencia tápfeszültség 1,71 V - VDD (csak MPU-6050). Az LDO kimenetet a REGOUT kondenzátor megkerüli. A kondenzátorral kapcsolatos további részleteket lásd a Külső alkatrészek anyagjegyzékében (7.3 szakasz). |
7.20 Bias and LDO The bias and LDO section generates the internal supply and the reference voltages and currents required by the MPU-60X0. Its two inputs are an unregulated VDD of 2.375 to 3.46V and a VLOGIC logic reference supply voltage of 1.71V to VDD (MPU-6050 only). The LDO output is bypassed by a capacitor at REGOUT. For further details on the capacitor, please refer to the Bill of Materials for External Components (Section 7.3). |
| 7.21 Töltőszivattyú A fedélzeti töltőszivattyú generálja a MEMS oszcillátorokhoz szükséges magas feszültséget. Kimenetét a CPOUT kondenzátora megkerüli. A kondenzátorral kapcsolatos további részleteket lásd a Külső alkatrészek anyagjegyzékében (7.3 szakasz). |
7.21 Charge Pump An on-board charge pump generates the high voltage required for the MEMS oscillators. Its output is bypassed by a capacitor at CPOUT. For further details on the capacitor, please refer to the Bill of Materials for External Components (Section 7.3). |
| 8 programozható megszakítás Az MPU-60X0 programozható megszakító rendszerrel rendelkezik, amely megszakítási jelet generálhat az INT tűn. Az állapotjelzők jelzik a megszakítás forrását. |
8 Programmable Interrupts The MPU-60X0 has a programmable interrupt system which can generate an interrupt signal on the INT pin. Status flags indicate the source of an interrupt. Interrupt sources may be enabled and disabled individually. |
||||||||||||||||||||
|
|
|
||||||||||||||||||||
| A megszakított források külön-külön engedélyezhetők és letilthatók. A megszakítási engedélyezési / letiltási regiszterekkel és a jelzőregiszterekkel kapcsolatos információkat lásd az MPU6000 / MPU-6050 regisztrációs térkép és a regisztrációs leírások dokumentumban. Néhány megszakító forrást az alábbiakban ismertetünk. | For information regarding the interrupt enable/disable registers and flag registers, please refer to the MPU6000/MPU-6050 Register Map and Register Descriptions document. Some interrupt sources are explained below. |
- Az MPU 6050 IC jelzi az MCU-nak, hogy készen vannak az adatok,
SPI-ben történő alkalmazás esetén:
SCL - SPI szinkron (órajel) jel SCK kimenet a minrokontrolletnél
SDA- SPI adatbemenet, így a mikrokontroller SDO
Jó leírás a modulról: https://components101.com/sensors/mpu6050-module
Adatlap (ha van újabb, akkor lecserélni. Ez: Revision 3.4, Date: 08/19/2013 ) : https://www.invensense.com/wp-content/uploads/2015/02/MPU-6000-Datasheet1.pdf
Regiszter mappa: https://www.invensense.com/wp-content/uploads/2015/02/MPU-6000-Register-Map1.pdf
Programozáshoz: https://playground.arduino.cc/Main/MPU-6050/
Programozáshoz: https://playground.arduino.cc/Main/MPU-6050/
https://playground.arduino.cc/Main/MPU-6050/
https://github.com/jrowberg/i2cdevlib/tree/master/PIC18/MPU6050
magyar: https://shop.tavir.hu/product_info.php/szenzor-irany-seb-magas-521-mpu6050-gyroszkop-gyorsulas-szenzor-p-175
Más nagyon hasonló típus: http://www.farnell.com/datasheets/2632676.pdf?_ga=2.12941623.1492168416.1575758157-956081480.1538725542&_gac=1.217907618.1575758157.EAIaIQobChMImt-cur6k5gIVF6qaCh0_4QhdEAMYASAAEgIV8fD_BwE
Giroszkópokról általában: http://www.kjit.bme.hu/images/stories/targyak/automatikus_fedelzeti/SA_1_EA.pdf
Másik típus (ICM-20608-G Motion Tracking Device): https://components101.com/sensors/icm-20608-g
Magnetometer is (újabb típus szerintem) (BNO080, BNO085, stb.) :
https://www.ceva-dsp.com/wp-content/uploads/2019/09/BNO080-BNO085-Migration-Guide.pdf
https://www.digikey.com/en/product-highlight/h/hillcrest-labs/bno080-imu
https://www.davidpilling.com/wiki/index.php/BNO055
https://cdn-shop.adafruit.com/datasheets/BST_BNO055_DS000_12.pdf
Bemutató és ismertető MPU 6050 : http://digitelektro.hu/gyorsulas-mero-es-giroszkop-kombo-mpu6050-ic-vel/
Professzionális gyroscope oldala : http://www.tuoluoyi.com/en/show.asp?id=86
Szakdoga róla: https://tdk.bme.hu/VIK/DownloadPaper/Precizios-oraszinkronizacio-es-alkalmazasa
Komolyabb magyar link: http://digitelektro.hu/gyorsulas-mero-es-giroszkop-kombo-mpu6050-ic-vel/
-
'===CHIP SETTINGS===
-
$regfile = "m128def.dat"
-
$framesize = 320
-
$swstack = 160
-
$hwstack = 160
-
$crystal = 16000000
-
$baud1 = 38400
-
-
Config Scl = Portd.0
-
Config Sda = Portd.1
-
-
Open "COM2:" For Binary As #1
-
Const Mpuaddw = &B11010000 'AD0 auf Masse
-
Const Mpuaddr = &B11010001
-
'--MPU6000--
-
Dim Test As Byte
-
Dim Gyrox As Integer
-
Dim Gyroy As Integer
-
Dim Gyroz As Integer
-
Dim Tmp_gyrox(2) As Byte At Gyrox Overlay 'nick
-
Dim Tmp_gyroy(2) As Byte At Gyroy Overlay 'roll
-
Dim Tmp_gyroz(2) As Byte At Gyroz Overlay 'yaw
-
Dim Xacc_pre As Integer
-
Dim Yacc_pre As Integer
-
Dim Zacc_pre As Integer
-
Dim Tmp_accx(2) As Byte At Xacc_pre Overlay
-
Dim Tmp_accy(2) As Byte At Yacc_pre Overlay
-
Dim Tmp_accz(2) As Byte At Zacc_pre Overlay
-
Dim Meas_nick As Single
-
Dim Meas_roll As Single
-
Dim Yaw_gyro As Single
-
Dim Xacc As Single
-
Dim Yacc As Single
-
Dim Zacc As Single
-
-
Declare Sub Read_mpu
-
Declare Sub Init_mpu
-
-
I2cinit
-
-
-
-
Waitms 100
-
Init_mpu
-
Print #1 , "OK";
-
-
-
-
-
Do
-
Read_mpu
-
-
Waitms 250
-
-
Print #1 , "$" ; Meas_nick;
-
Loop
-
-
End
-
-
Sub Init_mpu
-
I2cstart 'start condition
-
I2cwbyte Mpuaddw 'write adress of MPU-6050
-
I2cwbyte 117 'Register 117 "Who am I"
-
I2crepstart 'repeated start
-
I2cwbyte Mpuaddr 'read adress of MPU-6050
-
I2crbyte Test , Nack 'read byte WHO_AM_I (Reg 117)
-
I2cstop 'stop condition
-
I2cstart 'start condition
-
I2cwbyte Mpuaddw 'write adress of MPU-6050
-
I2cwbyte 25 'Register 25 Sample Rate Divider (1..8 kHz)
-
'mal spielen...
-
'&B00000001 wäre 500 Hz
-
I2cwbyte &B00000000 'Divider set to 1 (soll)
-
I2cstop 'stop condition
-
'Low pass filter
-
'0=256Hz &B00000000
-
'1 = 188hz &B00000001
-
'2 = 98hz &B00000010
-
'3 = 42hz &B00000011
-
'4 = 20hz &B00000100
-
'5 = 10hz &B00000101
-
'6 = 5hz &B00000110
-
I2cstart 'start condition
-
I2cwbyte Mpuaddw 'write adress of MPU-6050
-
I2cwbyte 26 'Register 26 DLPF_CFG (digital lowpass filter) Configuration
-
I2cwbyte &B00000011 'Bits 0..2 = 000 - ACC:260Hz, 0.0ms; Gyro:256Hz, 0.98ms ( &B00000000 )
-
I2cstop 'stop condition
-
'42hz scheint gut
-
'gyro full range
-
'250°/s &B00000000
-
'500°/s &B00001000
-
'1000°/s &B00010000
-
'2000°/s &B00011000
-
-
I2cstart 'start condition
-
I2cwbyte Mpuaddw 'write adress of MPU-6050
-
I2cwbyte 27 'Register 27 Gyro Configuration
-
I2cwbyte &B00011000 'Bits 3+4 = 00 - Full Scale Range: +/-250°/s
-
I2cstop 'stop condition
-
'ACC full range
-
'+-2g &B00000000
-
'+-4g &B00001000
-
I2cstart 'start condition
-
I2cwbyte Mpuaddw 'write adress of MPU-6050
-
I2cwbyte 28 'Register 28 ACC Configuration
-
'set to +-8g?
-
'&B00000000 = 2g
-
'&B00001000 = 4g
-
'&B00010000 = 8g
-
'&B00011000 = 16g
-
I2cwbyte &B00000000 'Bits 3+4 = 00 - Full Scale Range: +/-2g / No High Pass Filter
-
I2cstop 'stop condition
-
I2cstart 'start condition
-
I2cwbyte Mpuaddw 'write adress of MPU-6050
-
I2cwbyte 107 'Register 107 Power Management 1
-
'temp enabled: &B00000011
-
'temp disabled: &B00001011
-
I2cwbyte &B00000011 'No Reset / No Sleep / No Cycle / Temp_Sens: Dis / Clock Source: Z-Gyro
-
I2cstop
-
End Sub
-
-
Sub Read_mpu
-
I2cstart 'X ACC
-
I2cwbyte Mpuaddw
-
I2cwbyte 59
-
I2crepstart
-
I2cwbyte Mpuaddr
-
I2crbyte Tmp_accx(2) , Ack
-
I2crbyte Tmp_accx(1) , Ack
-
I2crbyte Tmp_accy(2) , Ack
-
I2crbyte Tmp_accy(1) , Ack
-
I2crbyte Tmp_accz(2) , Ack
-
I2crbyte Tmp_accz(1) , Nack
-
I2cstop
-
I2cstart 'X GYRO
-
I2cwbyte Mpuaddw
-
I2cwbyte 67
-
I2crepstart
-
I2cwbyte Mpuaddr
-
I2crbyte Tmp_gyrox(2) , Ack
-
I2crbyte Tmp_gyrox(1) , Ack
-
I2crbyte Tmp_gyroy(2) , Ack
-
I2crbyte Tmp_gyroy(1) , Ack
-
I2crbyte Tmp_gyroz(2) , Ack
-
I2crbyte Tmp_gyroz(1) , Nack
-
I2cstop
-
' Shift xAcc , Right , 5 , Signed '+-1024 bei 2g
-
' Shift yAcc , Right , 5 , Signed
-
' Shift zAcc , Right , 5 , Signed
-
' Shift Meas_nick , Right , 5 , Signed '+-1024 bei 250°/s
-
' Shift Meas_roll , Right , 5 , Signed
-
' Shift Yaw_gyro , Right , 5 , Signed
-
'Meas_nick = Gyrox / 76.8 '65536/1024/(300/250) MPU gyro scaling equals adxrs300 scaling
-
'Meas_roll = Gyroy / 76.8
-
'Yaw_gyro = Gyroz / 76.8
-
' Meas_nick = Gyrox / 38.4 'bei 500°/s
-
' Meas_roll = Gyroy / 38.4
-
' Yaw_gyro = Gyroz / 38.4
-
Meas_nick = Gyrox / 8.7 'bei 2000°/s
-
Meas_roll = Gyroy / 8.7
-
Yaw_gyro = Gyroz / -8.7
-
-
Xacc = Xacc_pre '65536/1024 MPU acc scaling equals ADXL322 scaling
-
Yacc = Yacc_pre
-
Zacc = Zacc_pre
-
-
-
End Sub